Tecniche avanzate di gestione della Sensibilità e della Discriminazione
di Leonardo Ciocca – © 2016 AMD Tech Team Ho deciso di scrivere questo articolo dopo aver effettuato numerosi esperimenti
Leggi tutto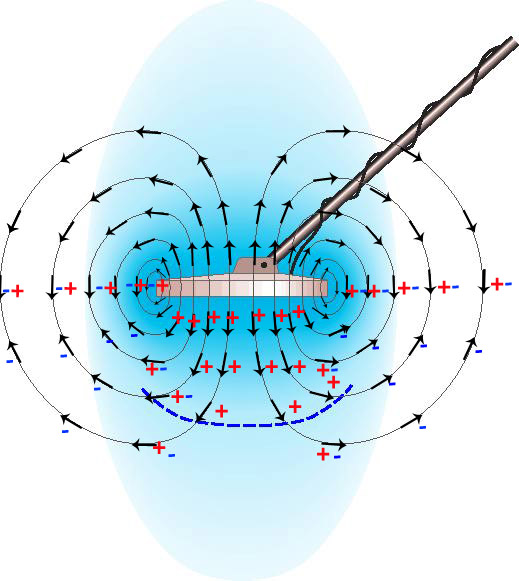
di Leonardo Ciocca – © 2016 AMD Tech Team Ho deciso di scrivere questo articolo dopo aver effettuato numerosi esperimenti
Leggi tutto
L’AMD Tech Team ha sempre dedicato molto spazio alle innovazioni tecnologiche legate al metal detecting. Abbiamo anche creato una pagina
Leggi tutto
Quante volte mi hanno fatto la domanda: “Ma qual è il detector che va più in profondità?” oppure: “Come posso
Leggi tutto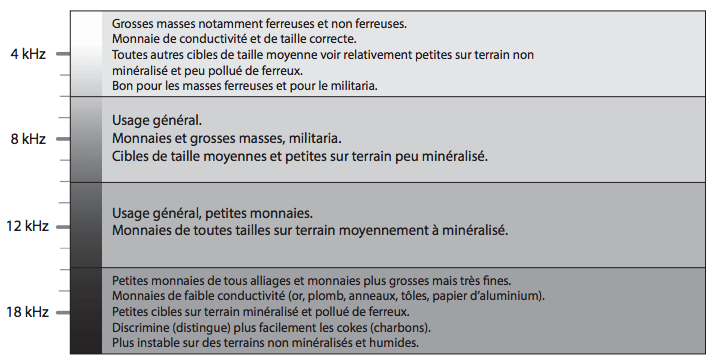
Sin dall’uscita della prima versione dell’XP DEUS, molti dubbi e confusione si sollevarono circa le caratteristiche funzionali delle 4 frequenze
Leggi tutto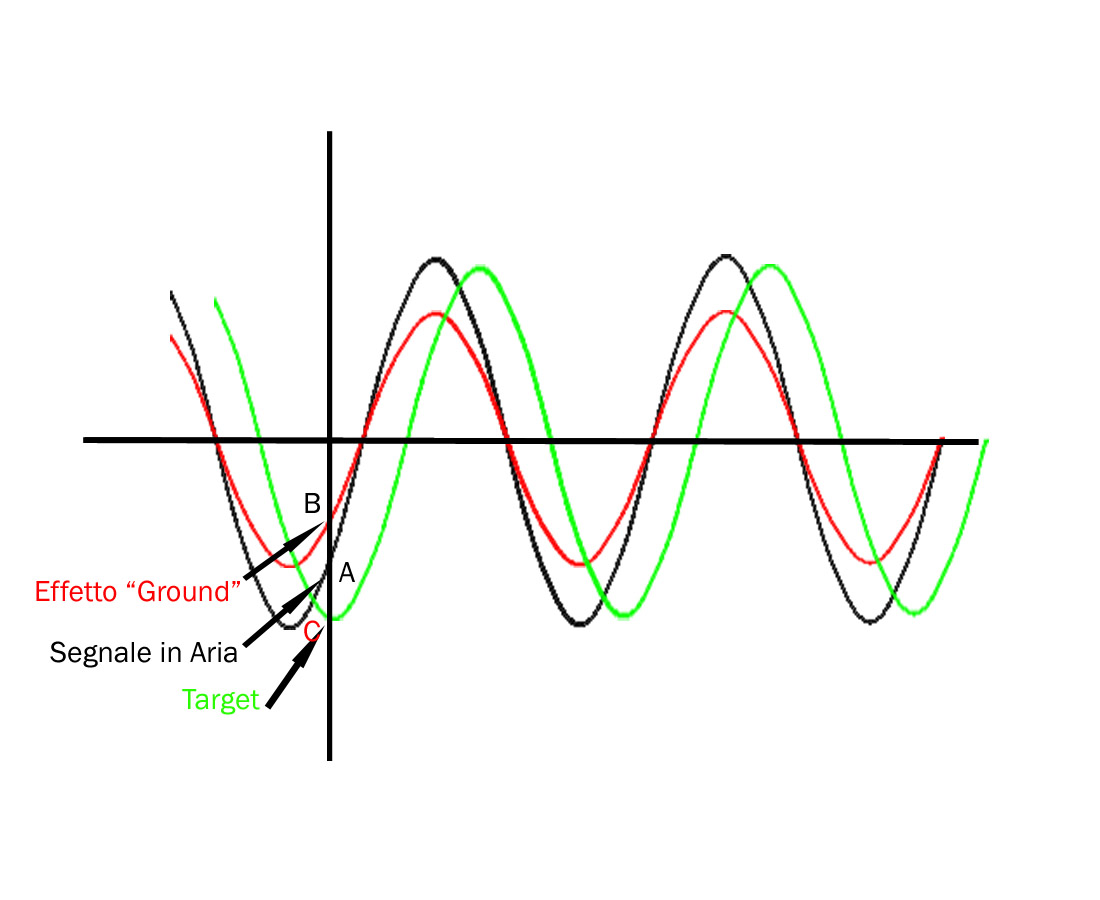
Una delle più grandi innovazioni introdotte con i metal detector basati su tecnologia VLF/IB (Very Low Frequency/Induction Balance) è stata
Leggi tutto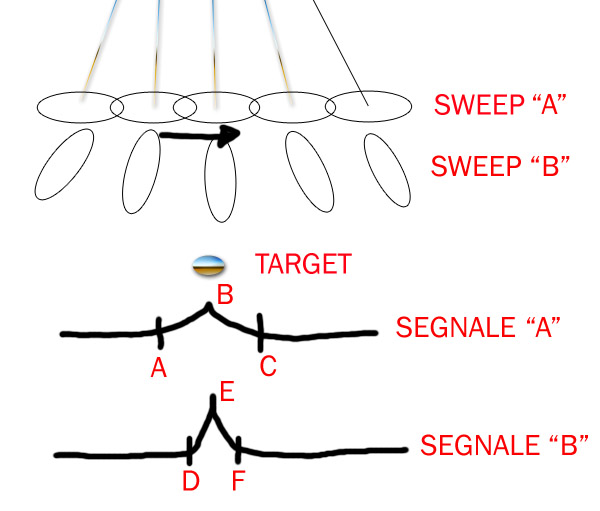
Dopo aver analizzato alcune tematiche relative alla ricerca in profondità, anche su invito di alcuni amici, vorrei ora concentrarmi sulla
Leggi tutto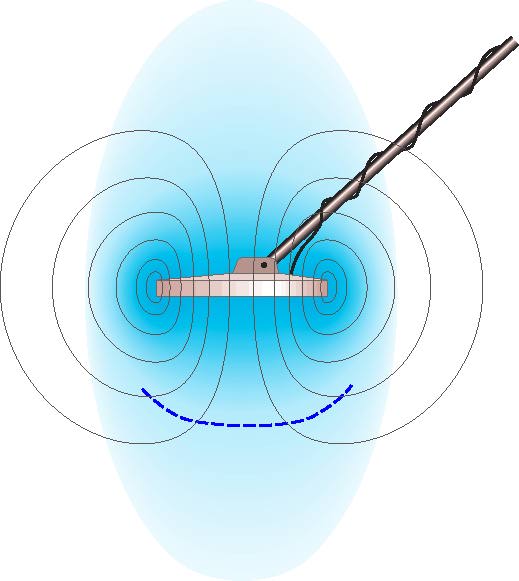
In questo breve articolo illustreremo in modo semplice le caratteristiche peculiari delle piastre più diffuse sul mercato dei Metal Detector
Leggi tutto
In questi giorni, alcuni mie amici mi hanno chiesto di fornire qualche chiarimento circa la capacità dei metal detector Pulse
Leggi tutto
Nell’introdurre il tema principale dell’articolo, per semplicità, iniziamo col distinguere quali possano essere i target d’oro rilevabili. Possiamo facilmente distinguerli
Leggi tuttoAs I claimed a couple weeks ago, I’ve decided to begin publishing my personal study about the possibility to have
Leggi tuttoCome annunciato un paio di settimane fa, ho deciso di iniziare a pubblicare uno studio che sto personalmente effettuando circa
Leggi tutto
L’altro giorno, il mio amico Ario, mi ha scritto una email chiedendomi un consiglio circa un detector da acquistare che
Leggi tuttoPubblico anche qui la risposta che ho inserito nel forum METALDETECTORPERTUTTI alla domanda dell’amico Robpd che chiedeva spiegazioni sul come
Leggi tuttoSEF è l’acronimo di Symmetric Electromagnetic Field (Campo Elettromagnetico Simmetrico) ed è una tecnologia proprietaria della francese DETECH. Le piastre
Leggi tuttoDopo la pubblicazione del mio ultimo articolo sul confronto tra Piastre DD e Concentriche, si è aperto un ampio dibattito
Leggi tutto