Guida all’uso intelligente dei Sistemi di Bilanciamento
Una delle più grandi innovazioni introdotte con i metal detector basati su tecnologia VLF/IB (Very Low Frequency/Induction Balance) è stata sicuramente la capacità di bilanciare il disturbo introdotto dal terreno. E’ ben noto che la mineralizzazione ferrosa presente nel suolo, in quantità che va dal quasi nullo all’estremo, disturbi il campo elettromagnetico emesso dal detector compromettendone le prestazioni. I primi detector per uso hobbistico, basati su tecnologia BFO (Beat Frequency Oscillator) e TR (Trasmit-Receive) erano parecchio limitati da questo disturbo e offrivano, specie su terreni estremamente mineralizzati, prestazioni scadenti se non addirittura diventavano inutilizzabili…
Con l’introduzione dei VLF si riuscì, finalmente, ad introdurre dei sistemi in grado di “compensare” o “bilanciare” questo effetto di disturbo in modo da cancellarlo o, quantomeno, ridurlo in maniera significativa.
I tre sistemi più comuni di bilanciamento (Ground Balancing) sono i seguenti:
- Fisso o Factory Preset
- Manuale
- Automatico

Il primo di questi sistemi, quello “FISSO”, di solito adottato nei modelli più economici, non prevede alcun intervento da parte dell’utente.
Si tratta di una circuiteria che viene tarata in fabbrica in modo che contrasti una mineralizzazione che, con “maggiore probabilità”, si incontrerà.
Si tratta di una sorta di valore medio probabile che, secondo i progettisti, è quello che più ci si aspetta di affrontare sul terreno.
Va da se che questo sistema possa trovarsi in seria difficoltà su terreni con una mineralizzazione molto forte o anomala, con continue variazioni, non avendo possibilità di essere regolato in alcun modo.

Il secondo, detto “MANUALE”, prevede l’intervento dell’operatore per essere tarato sul terreno. L’utente dovrà infatti ruotare un pomello (o pigiare dei tasti) mentre compie alcune azioni col detector come, ad esempio, alzare e abbassare la piastra sul terreno (in gergo “bobbing” o “pompare la piastra”) fino alla stabilizzazione dello strumento.
Il vantaggio di questo sistema è che permette all’utente di adattare al meglio il detector alla mineralizzazione del terreno in modo da offrire il meglio delle prestazioni quasi su ogni tipo di suolo.
Lo svantaggio è che sarà necessario, di tanto in tanto, provvedere ad una nuova taratura, perchè normalmente il livello di mineralizzazione non resta sempre costante. Se quindi non si effettua una nuova corretta taratura, il detector potrebbe perdere prestazioni in maniera significativa.

L’ultimo, ovvero quello “AUTOMATICO”, non richiede l’intervento dell’operatore, se non al limite per una prima veloce taratura, ma opera in maniera completamente autonoma. Il detector riesce a riconoscere le variazioni della mineralizzazione e ad auto-tararsi per essere sempre al massimo dell’efficienza. Pare superfluo dire che questo sistema rappresenta, teoricamente, la miglior soluzione per il Ground Balancing ma, in tutta onestà, anche il sistema Automatico non è esente da svantaggi. Innanzitutto la precisione del sistema automatico non sarà mai così elevata come quella manuale. Fortunatamente l’uomo è ancora la macchina più sofisticata e precisa per questo tipo di taratura. Poi non tutti i sistemi automatici hanno la stessa “aggressività” nel senso che riescono a stare dietro alle variazioni della mineralizzazione con sufficiente reattività. In alcuni casi poi, specie su terreni con mineralizzazione alkalina o con mineralizzazione nulla, i sistemi automatici tendono a “perdere la testa” non riuscendo ad individuare il punto esatto di bilanciamento e rendendo la macchina instabile.
Ma, aldilà dei vari sistemi, come fa il detector a bilanciare la mineralizzazione e a ridurre il disturbo?
TEORIA (Attenzione! Parte pallosa…)
Una serie di semplici (e brutti) grafici potranno essere utili a semplificare il discorso.
Guardiamo cosa accade quando un segnale viene emesso con la piastra in aria.
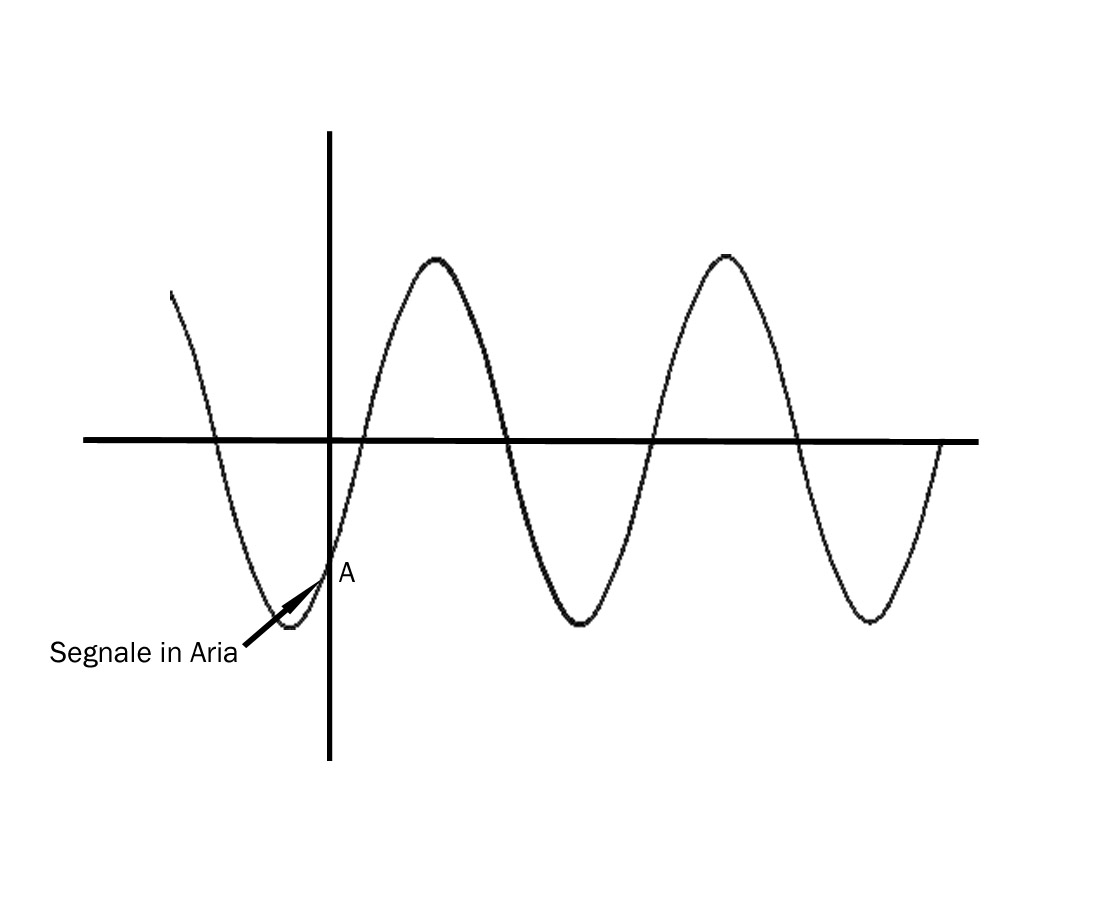
Questa sinusoide rappresenta il segnale emesso dal detector quando si tiene la piastra in aria e non ci sono oggetti metallici nelle vicinanze. L’asse cartesiano verticale individua il punto in cui il detector analizza il segnale per determinare variazioni introdotte da oggetti metallici. In pratica in un certo istante, viene preso un “campione” di segnale e viene elaborato. In questo caso semplificato, al momento del campionamento, il segnale campionato produce un certo valore corrispondente alla distanza tra l’incrocio degli assi e il punto “A”.
Vediamo ora cosa accade quando avviciniamo la piastra ad un terreno dotato di un minimo di mineralizzazione.
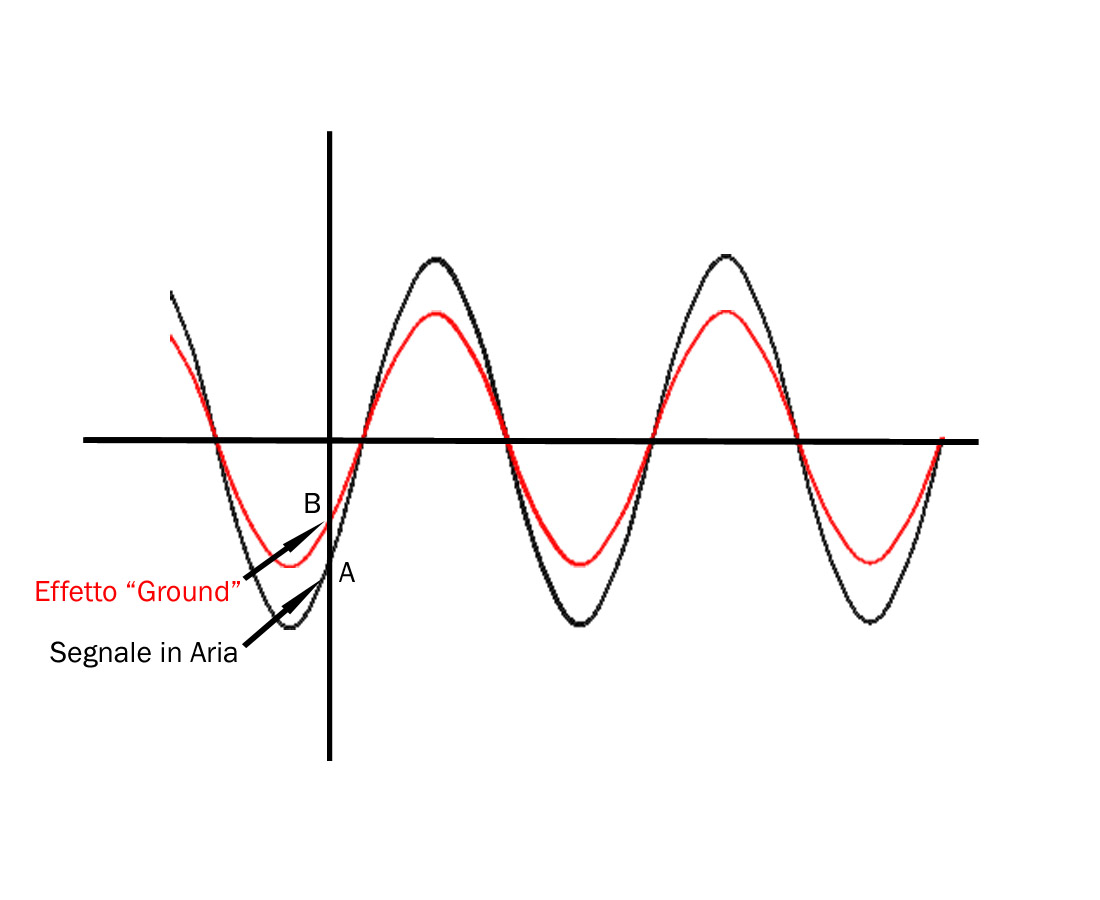
Per rendere ancora più evidente ciò che accade, ho lasciato la sinusoide che abbiamo visto prima (riferita alla piastra in aria) come termine di paragone. La sinusoide rossa invece rappresenta il segnale “alterato” dalla presenza di mineralizzazione (“Effetto Ground”). Come potete notare, il segnale è diminuito in ampiezza ma non ha subito alcuno “slittamento” ne verso destra ne verso sinistra. Si è solo leggermente “compresso”. Stavolta, al momento del campionamento, il valore sarà quello relativo alla distanza tra l’incrocio degli assi e il punto “B”.
Analizziamo ora ciò che succede quando passiamo la piastra su un target metallico.
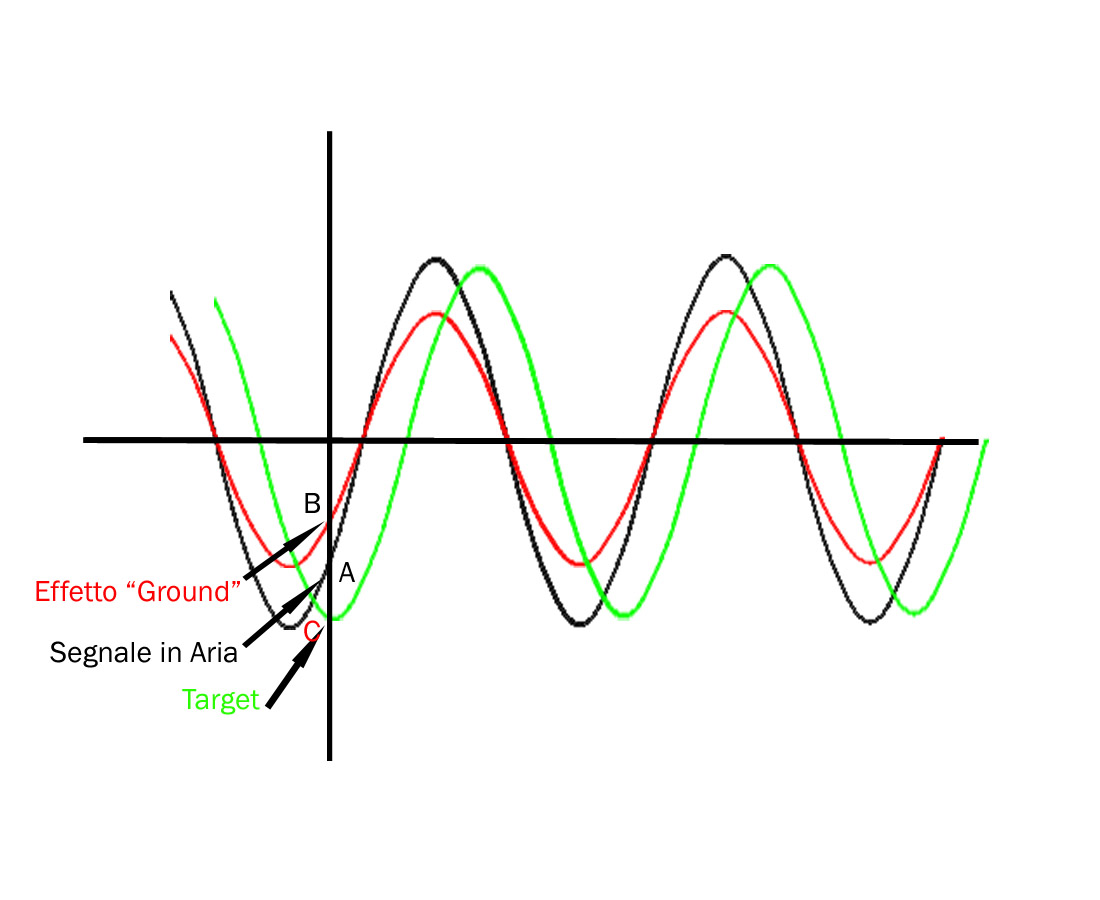
Anche in questo caso, per fini illustrativi, ho lasciato nel grafico anche le sinusoidi precedenti, in modo da rendere più visibili le alterazioni. E’ ovvio che il segnale relativo al target, come anche indicato nel disegno, sarà quello in verde. Ciò che accade ora è una triplice alterazione del segnale. Non solo c’è una modificazione in ampiezza, dovuta sia alla presenza di mineralizzazione che alla conduttività dell’oggetto, ma c’è anche un visibile slittamento dell’onda verso destra. Questo slittamento, detto “Ritardo di Fase” è tipico degli oggetti metallici. Sarà piuttosto contenuto con oggetti ferrosi o poco conduttivi, mentre sarà più deciso con oggetti non ferrosi ad alta conduttività.
Anche stavolta analizziamo il campionamento e vediamo che l’onda relativa al target viene intercettata al punto “C”. La posizione del punto “C” rispetto all’asse verticale, come detto poc’anzi, non dipende solo da quanto il segnale si sia spostato verso destra (il “Ritardo di Fase”), ma anche dall’alterazione dovuta alla presenza di mineralizzazione (il “Ground Effect”).
Ma come possiamo cercare di “scorporare” dalle informazioni che ricaviamo la componente collegata alla mineralizzazione? In sostanza, come possiamo “compensare” o “bilanciare” il detector e introdurre quello che in gergo tecnico detectoristico viene chiamato Ground Exclusion Balance o GEB? Siamo arrivati alla fine della parte teorica pallosa…
Ecco il grafico finale…
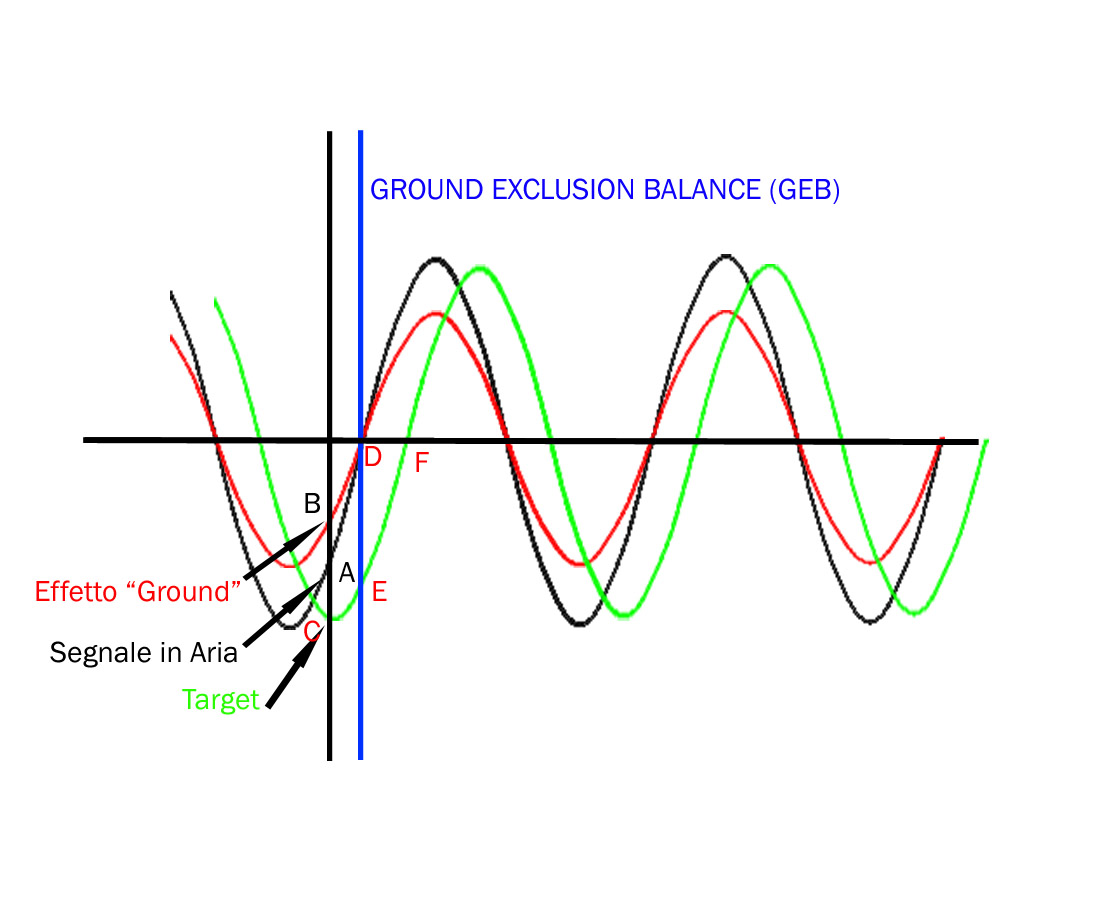
Per eliminare la componente relativa al Ground Effect non dobbiamo far altro che spostare il punto di campionamento! Ma dove?
 La soluzione richiede di osservare nuovamente i grafici relativi alla piastra in aria e a quello con mineralizzazione. Se osserviamo bene le onde vedremo che hanno dei punti coincidenti, ovvero quando le onde incontrano l’asse orizzontale! In quel punto il valore di segnale è ZERO e non c’è alcuna alterazione d’ampiezza dovuta all’Effetto Ground. Se ora spostiamo li (Punto “D”) il nostro istante di campionamento, avremo individuato il punto esatto in cui il segnale viene “scorporato” (leggi “Bilanciato”) della parte di alterazione dovuta alla mineralizzazione. Se infatti ora guardate il grafico finale, vedrete che, dopo aver spostato il punto di campionamento, l’onda relativa al target è ora intercettata nel punto “E”, producendo un livello di segnale “ripulito” dalla componente mineralizzata.
La soluzione richiede di osservare nuovamente i grafici relativi alla piastra in aria e a quello con mineralizzazione. Se osserviamo bene le onde vedremo che hanno dei punti coincidenti, ovvero quando le onde incontrano l’asse orizzontale! In quel punto il valore di segnale è ZERO e non c’è alcuna alterazione d’ampiezza dovuta all’Effetto Ground. Se ora spostiamo li (Punto “D”) il nostro istante di campionamento, avremo individuato il punto esatto in cui il segnale viene “scorporato” (leggi “Bilanciato”) della parte di alterazione dovuta alla mineralizzazione. Se infatti ora guardate il grafico finale, vedrete che, dopo aver spostato il punto di campionamento, l’onda relativa al target è ora intercettata nel punto “E”, producendo un livello di segnale “ripulito” dalla componente mineralizzata.
BINGO!
Come si fa a spostare il punto di campionamento? Semplicemente con i tre sistemi che ho illustrato all’inizio dell’articolo: In modo “Fisso”, “Manuale” o “Automatico”.
Ma ora che ci siano annoiati abbastanza, da tutta questa pappardella, è possibile ottenere qualche informazione utile a migliorare le prestazioni sul campo?
Consigli e Trucchi pratici… Era ora!
Una volta acquisite le nozioni su come funzionano i sistemi di bilanciamento, possiamo, almeno in alcuni casi, sfruttare le possibilità del nostro detector per ottenere dei vantaggi pratici in ricerca vera.
Escludendo i detector con sistema “fisso”, che non ci permettono di modificare nulla (ma torneremo dopo su questo tipo di cercametalli con un simpatico trucchetto), soffermiamoci sui sistemi manuali e automatici.
Dovete sapere che non sempre è utile che il bilanciamento sia “perfetto” ovvero sia esattamente coincidente con il punto di azzeramento visto sopra. In alcuni casi può essere vantaggioso settare la macchina con un leggero “sottobilanciamento” e in altri con un leggero “sovrabilanciamento”. Ma cosa significa in parole povere?
Una macchina sottobilanciata tenderà a sentire un pochino il terreno creando una leggera amplificazione di tutto il segnale ricevuto. Viceversa il sovrabilanciamento tenderà a smorzare un po’ il medesimo segnale. Ma come si fa a capire se la macchina è sotto o sovrabilanciata?
Normalmente i detector con bilanciamento manuale dispongono anche di un suono di soglia. Questo suono di sottofondo aiuta il detectorista a capire se la macchina è perfettamente bilanciata (suono stabile e continuo), sovrabilanciata (suono che tende a diminuire di volume quando avviciniamo la piastra al terreno e che resta più basso del normale), o sottobilanciata (suono che tende ad aumentare di volume all’avvicinarsi della piastra e che resta più alto del normale).
Si, ma come possono esserci utili queste alterazioni?
I target piuttosto piccoli sono contraddistinti ovviamente dalla debolezza del segnale ad esso collegato. Se poi sono anche profondi, è possibile che la macchina non possieda abbastanza sensibilità per captarli. Come migliorare le probabilità di individuare questi target? Appunto amplificando leggermente il segnale con un “sottobilanciamento”. Questa leggera modica potrà in alcuni casi darci quel “quid” in più che ci aiuterà a rilevare questi target minuscoli. Va da se che non dovremo esagerare nel sottobilanciare la macchina a pena di renderla instabile per via dell’amplificazione contestuale del Ground Effect.
E a cosa può far comodo “sovrabilanciare”?

In alcuni terreni sono presenti le cosiddette hot-rocks, ovvero rocce con un contenuto anomalo di mineralizzazione. Questa concentrazione straordinaria di minerale spesso da luogo a false segnalazioni che, in alcuni casi, possono rendere davvero un incubo la nostra ricerca quando le hot-rocks infestano il terreno.
Per ridurre il loro impatto possiamo effettuare un leggero sovrabilanciamento andando così a “smorzare” un po’ gli effetti di disturbo di queste mineralizzazioni anomale. Sono sicuro che molti di voi avranno già intuito che un eccesso di sovrabilanciamento andrà a penalizzare anche la rilevazione di target buoni, comprimendo troppo il loro segnale.
Ma con i sistemi automatici?
I detector dotati di sistema automatico di bilanciamento non sempre permettono di “sovra” o “sotto” bilanciare dato che il processo di taratura sfugge al controllo dell’operatore.
Ma non c’è modo di aggirare i limiti?
 In alcuni casi i progettisti dei detector con bilanciamento automatico offrono la possibilità all’operatore di impostare un certo Offset (un valore di scarto) sia positivo che negativo. In questo caso, pur se la macchina si bilancerà da sola, provvederà anche ad applicare l’offset richiesto restando dunque “sovrabilanciata” o “sottobilanciata”.
In alcuni casi i progettisti dei detector con bilanciamento automatico offrono la possibilità all’operatore di impostare un certo Offset (un valore di scarto) sia positivo che negativo. In questo caso, pur se la macchina si bilancerà da sola, provvederà anche ad applicare l’offset richiesto restando dunque “sovrabilanciata” o “sottobilanciata”.
In altri modelli, pur non essendo previsto l’offset, è possibile, dopo aver tarato la macchina, “bloccare” il sistema di bilanciamento (Ground LOCK) in modo che non si aggiorni più. E’ qualcosa di simile al sistema manuale con la sola differenza che la taratura iniziale viene fatta dalla macchina e non ruotando un pomello o pigiando dei tasti.
Bhè? Allora?
Anche in questo caso sarà possibile sottobilanciare la macchina, ricorrendo ad un piccolo trucco…
Quando effettuiamo la procedura di “pompaggio” (bobbing) per tarare il detector, invece di avvicinare la piastra dai 30-35 cm fino ai previsti 2 cm dal terreno, dovremo avvicinarla al massimo intorno ai 10-15 cm. In questo modo, durante le fasi di taratura, inganneremo la macchina facendogli credere che la mineralizzazione è molto più debole di quanto è in realtà.
Se ora però non “blocchiamo” il sistema, quando incominceremo a spazzolare esso auto-correggerà l’errore e la macchina perderà il sovrabilanciamento. Passando in “LOCK” invece manterremo sempre il detector in questa condizione d’errore che potremo sfruttare a nostro vantaggio.
E per sovrabilanciare?
Qui la cosa è solo leggermente più complicata ma sempre fattibile. Dobbiamo trovare un sistema per far credere al detector che la mineralizzazione sia più forte di quello che in realtà è.
Come possiamo fare? Bhè, anche se potrà sembrare poco pratico, basterà effettuare la procedura di “pompaggio”…su dei mattoni refrattari o dei cocci mineralizzati e poi, come sopra, passare in LOCK e bloccare il sistema.
L’altro giorno un mio amico mi ha segnalato un comportamento anomalo del suo detector (dotato di bilanciamento automatico) su terreno argilloso a mineralizzazione praticamente nulla. Non riusciva a stabilizzare la macchina che restava sempre un po’ “fuori di testa”.
Questo perchè il sistema automatico non riusciva ad individuare l’esatto punto di bilanciamento, dato che la mineralizzazione era pressochè inesistente. Ciò ha messo in crisi lo strumento facendogli continuamente sbagliare la taratura e provocando falsi segnali.
In questo caso è consigliabile disattivare il sistema automatico passando in LOCK in modo che il detector la smetta di comportarsi come un “flipper impazzito”.
In altri casi, se il detector lo prevede, aiuta utilizzare la funzione SALT/BEACH che renderà più quieta la macchina.
Ma che c’entra la compensazione per la mineralizzazione salina adesso? Qui parliamo di terra!
Spesso la presenza di sostanze alcaline nel terreno (fertilizzanti etc) o la scarsezza di minerale ferroso fa si che il punto corretto di bilanciamento sia molto distante dalla zona ferrosa che è quella più comune. La maggior parte dei sistemi automatici, per evitare che un errore di lettura del terreno possa far “sballare” la taratura, sono progettati per lavorare in una zona limitata. In pratica la loro capacità di escursione (vedi i grafici che ho inserito prima) viene limitata volontariamente per rimanere nella zona della mineralizzazione ferrosa. Se non fosse vincolata, potrebbe accadere che il sistema possa, per via di errori, essere “ballerino” e mai preciso.
Ma talvolta il punto reale di bilanciamento cade fuori da questa zona del ferroso. E’ il caso della battigia, dei terreni agricoli fertilizzati, o dei terreni con mineralizzazione quasi nulla.
In questi casi, il sistema automatico potrebbe restare “incatenato” nella sua zona del ferroso e non riuscire mai ad arrivare al punto giusto fuori da questa zona. Ecco che la funzione SALT permette di avere un range più ampio e una maggiore escursione nell’individuazione del punto esatto.
Concludendo, come vedete, il bilanciamento è uno degli aspetti più importanti per ottenere buone prestazioni dal vostro detector. Ovviamente la trattazione potrebbe andare avanti e toccare tematiche ancora più tecniche, ma credo per per il momento sia più che sufficiente per stroncare la pazienza anche del più incallito dei cercatori…
Hey! Ma avevi detto che ci avresti detto un piccolo trucco da utilizzare con i detector a bilanciamento fisso! Volevi fare il furbo?
No, come promesso, ecco un semplice trucchetto che vi potrà essere utile se cercate in battigia.
Come sapete la battigia è quella zona di spiaggia che continuamente è bagnata dall’acqua del mare ed è al confine con la sabbia asciutta. La sabbia bagnata con acqua salata contiene appunto mineralizzazione salina. Il Sale (Cloruro di Sodio – NaCl) è composto di ioni Sodio Na+ e ioni Cloruro Cl- e, quando è disciolto in acqua, conduce elettricità essendo il sodio un metallo.
In pratica il metal detector rileva l’acqua salata come se fosse un qualunque target non ferroso. Se già con metal detector con bilanciamento manuale o automatico è possibile avere grandi problemi a gestire questo tipo di mineralizzazione, figuriamoci con un detector con sistema fisso che, per definizione, è bloccato in un punto prestabilito della zona della mineralizzazione ferrosa impostato in fabbrica. Come è possibile allora tentare di arginare i falsi segnali dell’acqua salata con detector che non possono bilanciarla?
Innanzittutto abbassando la sensibilità dello strumento. Ma questa è una risposta un po’ scontata.
Ciò che possiamo fare oltre a questo però è DISCRIMINARE la stagnola!

I piccoli pezzetti di alluminio hanno una conduttività molto vicina a quella dell’acqua salata. In questo modo il nostro detector diventerà sia insensibile alla stagnola ma, allo stesso tempo, ridurrà gli effetti negativi dell’acqua salata. Questo trucco ovviamente non è miracoloso. Non vi aspettate di aver risolto definitivamente il problema, anzi. Diciamo che se prima la vostra macchina in battigia era praticamente inutilizzabile, ora magari qualche target riuscirete a individuarlo, specialmente se non è troppo profondo.
Bhè, per ora è tutto… Ora andiamo a fare una cercatina?
Leonardo Ciocca
AMD Tech Team
Bilanciamento quanto basta, tendente al nervosetto 😉 i falsi segnali, mineralizzazione, si capsicono 😉 Sinceramente un md muto è noioso 🙁 (sembra rotto, spento ) 😛