Velocità di Spazzolata: dalla teoria alla pratica
Dopo aver analizzato alcune tematiche relative alla ricerca in profondità, anche su invito di alcuni amici, vorrei ora concentrarmi sulla cosiddetta “Sweep Speed” o “Velocità di Spazzolata”.
Durante l’uso del metal detector, sia in spiaggia che su terra, questo fattore è uno dei più critici (insieme alla tecnica di sovrapposizione delle spazzolate) per ottenere i migliori risultati.
Senza indugiare oltre, vediamo quali sono alcuni dei fattori che verranno presi in considerazione nell’analisi della Sweep Speed:
- Velocità di Variazione del Segnale
- Ground Filters
- Grandezza e geometria della piastra
- Ampiezza dell’arco di spazzolata
Come vedremo, tutti questi fattori sono collegati tra di loro e devono essere considerati come un tutt’uno nell’analisi complessiva che intendiamo svolgere.
Per non complicare troppo il discorso, faremo riferimento a metal detector basati su tecnologia VLF.
Let’s start from the beginning…
Velocità di Variazione del Segnale
Cosa accade quando spazzoliamo sul terreno/sabbia?
La bobina trasmittente genera un campo elettromagnetico che investe sia la parte inferiore che quella superiore alla bobina stessa. Della parte superiore possiamo anche non interessarci, dato che, come recita un vecchio detto detectoristico “Le monete non volano…”. Questo campo elettromagnetico, almeno nella sua parte più sensibile, prende la forma di una sorta di “cono” (nel caso delle bobine concentriche rotonde) o di una specie di “chiglia di nave” (nel caso delle piastre DD. Questo cono o questa chiglia di nave riescono a penetrare nel terreno per alcuni cm. Se un oggetto metallico viene investito dal campo elettromagnetico, questo si modifica, dando luogo ad una serie di conseguenze che porteranno alla rilevazione dell’oggetto stesso.
Detto così sembra tutto molto facile… Ma…
Il terreno, per via della presenza di minerali ferrosi, provoca una deformazione spesso molto consistente del campo elettromagnetico dando luogo non solo alla diminuzione della profondità, ma anche a numerosi falsi segnali.
Nei moderni metal detector, i costruttori hanno deciso di affrontare questo problema adottando dei sistemi detti di “bilanciamento” o di “compensazione” del terreno.
Ma come funzionano e cosa hanno a che fare con l’argomento dell’analisi, ovvero la velocità di spazzolata?
La maggior parte dei detector VLF in commercio richiede che, per individuare un target, la piastra sia in movimento. Perchè è necessario che la piastra si muova per far “suonare” il detector in presenza di un oggetto metallico? Perchè il detector deve sentire una “variazione” del segnale rispetto a quello che si ha quando c’è solo terra/sabbia. E questa variazione deve essere anche abbastanza rapida e veloce! Perchè? Perchè se non è abbastanza veloce il sistema penserà che questa variazione lenta o lentissima sia dovuta alla mineralizzazione del terreno e non ad un oggetto metallico. Mmmm… sono sicuro che qualcuno avrà già iniziato ad intuire dove sto andando a parare…
Guardate ora il seguente grafico…
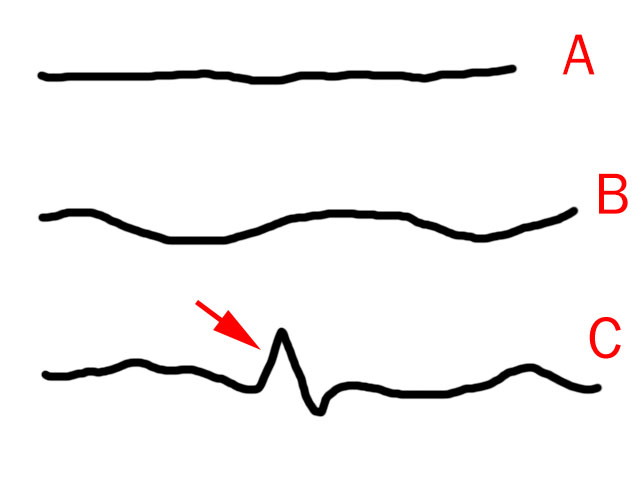
Il tracciato “A” indica approssimativamente il segnale elaborato quando la piastra è in aria. Come vedete, a parte minuscole variazioni, del tutto trascurabili, il segnale è piuttosto costante.
Il tracciato “B” invece, prodotto utilizzando la piastra su terreno mineralizzato, mostra una sorta di ondulazione che indica che il segnale è alterato dalla mineralizzazione del terreno che ha essa stessa delle variazioni. Ci sono zone del terreno dove è più intensa e dove invece lo è di meno.
Il Tracciato “C” è quello che illustra la piastra che sta spazzolando su terreno mineralizzato ma che, ad un certo punto (indicato dalla freccia rossa) incappa in un target metallico. Come vedete, l’onda prodotta è molto più violenta e acuta rispetto alle dolci colline della mineralizzazione. Ciò significa che, in coincidenza del target, è avvenuta una variazione molto più rapida del normale.
In sostanza, l’entità del segnale ha subito una brusca accelerazione, rispetto alle lente accelerazioni e decelerazioni dovute alla mineralizzazione ferrosa.
Ground Filters
Come sfruttare questa cosa per i nostri fini? Mmmm… semplice… Introduciamo il concetto di Ground Filter (o “Filtro Terreno”). Questo dispositivo non è altro che quello che in Elettronica viene chiamato un filtro “passa alto” (o passa-banda in alcuni casi).
Per farla semplice semplice, questi filtri riescono ad analizzare il segnale in ingresso e lasciano uscire solo quelli che superano una certa velocità di variazione. In pratica “bloccano” tutti quei segnali che cambiano lentamente (vedi la mineralizzazione ferrosa) mentre fanno passare tutti quei segnali che cambiano bruscamente (vedi i target metallici).
Questi Ground Filter sono alla base non solo dei sistemi di compensazione del terreno, ma anche, come è ovvio, dei sistemi di identificazione e discriminazione dei metalli.
Ma cosa hanno a che fare i Ground Filter con la Sweep Speed?
Bhè, credo che ormai quasi tutti voi lettori avrete capito il nesso. Ogni Ground Filter è tarato per raggiungere il massimo dell’efficienza quando la piastra lavora ad una certa velocità di movimento. Se muoviamo la piastra troppo lentamente, il Ground Filter (o meglio “i” Ground Filter, dato che di solito sono più di uno) potrebbe interpretare male le variazioni di segnale e scambiare un target per mineralizzazione. Viceversa, una velocità di spazzolata troppo esasperata potrebbe causare il problema opposto, con la mineralizzazione che viene suonata come un target o un target che viene sentito male per via del fatto che la macchina non è stata abbastanza reattiva.
Guardate questi altri tre tracciati…
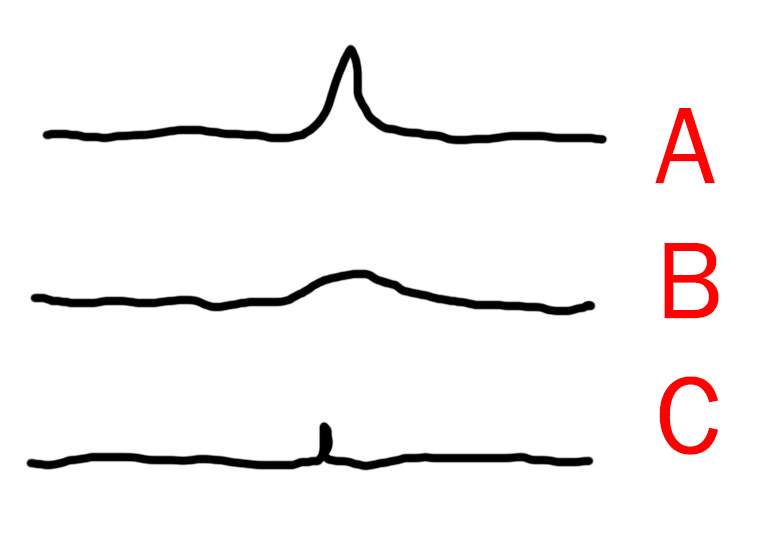
Il tracciato “A” è quello di un segnale relativo ad un target metallico che ha passato il filtro ground ad una giusta Sweep Speed ed è stato interpretato come target.
Il tracciato “B” è relativo allo stesso target, ma la velocità Sweep Speed è troppo lenta. In questo caso il detector ha percepito una variazione troppo lenta, assimilabile alla mineralizzazione. In questo caso il detector non segnalerà nulla.
Il tracciato “C” è sempre relativo allo stesso target, ma stavolta la Sweep Speed è eccessiva. Il filtro non lavora in modo efficiente e con molta probabilità il detector non sarà in grado di segnalare nulla anche stavolta.
Grandezza e geometria della piastra
E ora cosa c’entra la grandezza della piastra con la sweep speed? C’entra eccome!
La grandezza della piastra, specie la dimensione orizzontale, la sua geometria costruttiva (concentrica, DD, OO, 00 etc) hanno un legame strettissimo con tutti gli argomenti sopra esposti.
Quando la piastra passa sopra un target, inizia a rilevarlo appena poco fuori dal suo perimetro esterno. Il segnale diventa sempre più intenso quanto più il target arriva al centro della piastra e poi tende a diminuire quando il centro della piastra oltrepassa il target fino a sparire completamente.
Ecco un semplice grafico illustrativo di quanto appena detto.
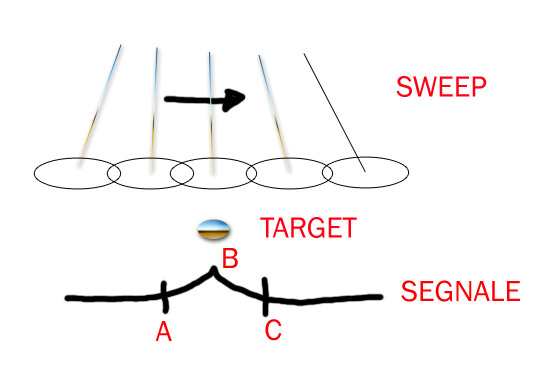
In questo grafico vediamo una piastra concentrica (vista in prospettiva da davanti) che passa sopra un target metallico ad una certa velocità in cm al secondo. Come vedete, quando la piastra è lontana dal target, il segnale è praticamente a zero. Il livello inizia a salire a partire dal punto “A”, ovvero quando il bordo esterno della piastra sta per finire sulla verticale del target. Continuando a muoversi, arriveremo al punto di massimo “B” corrispondente più o meno al centro della piastra. Andando avanti il segnale diventa sempre più debole fino al punto minimo “C” e poi continuare a zero.
Ma cosa accade se confrontiamo questa piastra concentrica con una piastra ovale molto più stretta, magari una DD?
Nel prossimo grafico comparativo sarà tutto molto evidente.
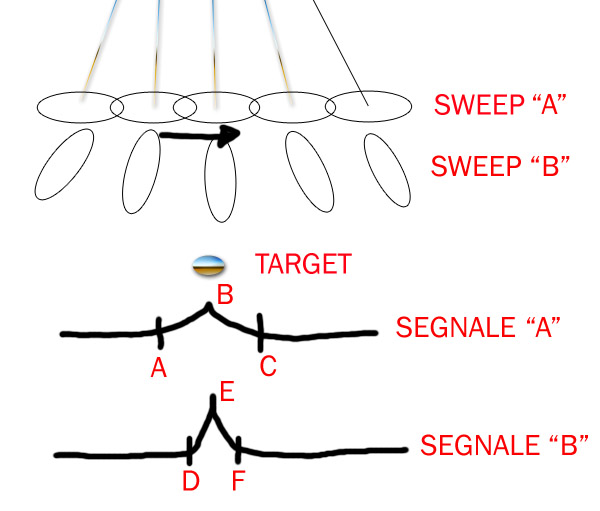
Nel disegno ho lasciato sia la piastra concentrica “Sweep A” ma ho inserito anche la “Sweep B” fatta alla stessa velocità ma con una piastra DD ovale molto più stretta della prima piastra.
Osservate ora il tracciato del Segnale “B”. Come potrete notare subito, per via della strettezza della piastra, l’aggancio del target inizia leggermente dopo rispetto a quanto accade con la concentrica. Il segnale però stavolta cresce molto più velocemente e, addirittura, raggiunge un picco leggermente più alto. Perchè? Perchè mentre la velocità assoluta della bobina DD è identica a quella concentrica, a variare è la velocità “relativa” tra piastra e target nelle zone di sensibilità.
Ma perchè il segnale “B” risulta leggermente più intenso di quello “A”. Qui, cari amici, entra in gioco l’efficienza del Ground Filter. Come ho detto prima, il Ground Filter lavora sull’accelerazione della variazione del segnale per fare il suo lavoro. Una accelerazione più lenta, come quella che si vede nel segnale “A” non permetterà al Ground Filter di lavorare in modo completamente efficiente e, ahimè, una parte di segnale verrà smorzata dal filtro. Viceversa, il segnale “B” è connotato da un’accelerazione molto più elevata. In questo caso il Ground Filter può lavorare al massimo della sua efficienza e sarà applicata una quantità minore di smorzamento.
Ora non rimane che affrontare l’ultimo punto in programma prima di passare dalla teoria alla pratica.
Ampiezza dell’Arco di spazzolata
A prescindere dal tipo e dalla grandezza della piastra e presupponendo l’applicazione di una forza fisica sostanzialmente costante per muovere il detector, un altro fattore critico per l’efficienza del funzionamento sarà l’ampiezza dell’arco di spazzolata. Qualcuno potrà chiedersi qual’è il legame tra questi due elementi.
Partiamo da zero…
Che cos’è la “spazzolata”?
Semplicemente è un movimento continuo da sinistra a destra e da destra a sinistra che descrive una sorta di ideale arco sul terreno.
Ma proviamo a scomporre questo movimento in fasi, partendo da fermi e immaginando di non avere alcun tipo di ostacolo sul terreno.
- Nel’istante iniziale ZERO la velocità della piastra è nulla.
- Quando iniziamo a muovere la piastra, diciamo verso destra, la piastra accelera da zero ad un certo valore. Acquista una certa velocità che poi, per un tratto di arco, possiamo considerare costante.
- Quando il nostro braccio ha raggiunto il suo limite fisiologico, la velocità inizierà a diminuire fino a zero, punto in cui applicheremo una forza nella direzione opposta, ovvero da destra verso sinistra.
- Nuovamente la piastra accelererà fino a raggiungere la sua velocità massima, che poi resterà costante per un certo tratto di arco, per poi diminuire fino a fermarsi per continuare l’alternanza dei movimenti da destra a sinistra e da da sinistra a destra.
No, non vi sto prendendo in giro… non vi sto parlando di acqua fritta.
La cosa su cui vorrei che si focalizzasse l’attenzione è su questo continuo variare dell’accelerazione della piastra. Ma oramai, se non vi siete addormentati fino ad ora per la pallosità di questo articolo, avrete già capito quanto il mantenimento di una certa velocità ottimale sia importante per l’efficiente funzionamento dei Ground Filter. Se l’arco di spazzolata è troppo piccolo, l’alternanza di cambi di direzione implicherà inevitabilmente una serie di “frena, fermati, accelera, frena, fermati,accelera” e così via che difficilmente permetterà di farci ottenere il massimo dell’efficienza e della performance. Il consiglio più ovvio è quindi quello di cercare di avere il più ampio arco di spazzolata possibile, proprio per evitare un eccessivo numero di cambi di direzione.
Dalla teoria alla pratica…
Vediamo ora come utilizzare al meglio queste informazioni. Partiamo dall’ultimo argomento trattato, l’arco di spazzolata. Operando su terreni senza particolari ostacoli, come ad esempio la spiaggia o la battigia, non sarà difficile mantenere archi di spazzolata molto ampi. Ma cosa facciamo quando dobbiamo operare tra rocce, radici e altri ostacoli naturali o artificiali?
La soluzione più semplice ed efficace sarà quella di montare sul nostro detector una piastra più piccola, specialmente in senso orizzontale. Questo accorgimento, come visto prima, permetterà di avere un funzionamento più efficace dei ground filter anche a velocità di spazzolata più bassa.
In questo modo, anche con spazzolate corte, il vostro detector non “perderà colpi” e vi offrirà prestazioni piuttosto buone.
Ma come si fa a capire qual’è la giusta velocità da imprimere alla piastra per ottimizzare i ground filter?

Esiste un metodo empirico piuttosto semplice ma molto efficace: seppellite una moneta a profondità progressive. 10-15-20-25 cm di profondità. Ovviamente su terreni particolarmente mineralizzati non servirà scendere troppo. Dovete arrivare al limite estremo e poi diminuire di 1-2 cm. A questo punto passate la piastra sopra il target sepolto a velocità differenti. Osservate qual’è la migliore velocità da applicare, quella che offre il segnale più solido e ripetibile. Quella è la velocità che dovreste cercare di tenere per avere il top della performance.
Se poi il vostro detector vi permette di impostare il numero o la velocità del Ground Filter, cercate di capire, a seconda del terreno in cui vi trovate, qual’è la migliore combinazione da usare.
Se invece la vostra macchina permette di regolare la Recovery Speed, ovvero la reattività del detector, pensate sempre che con Recovery molto spinte potrete spazzolare molto più velocemente e viceversa. Tutto ciò deve essere sempre valutato tenendo conto dell’efficienza generale dei Ground Filter. Alla fine, come al solito, il detector è un po’ come una coperta corta… lo sappiamo tutti no?
Buona ricerca!
Leonardo/”Bodhi”
AMD Tech Team Director
troppo belli questi articoli. Uno dei pochissimi davvero competente al massimo. Grazie!
Grazie mille Alessio… Sei gentilissimo…