Tecniche avanzate di gestione della Sensibilità e della Discriminazione
di Leonardo Ciocca – © 2016 AMD Tech Team
Ho deciso di scrivere questo articolo dopo aver effettuato numerosi esperimenti sia in ricerca vera che in ambiente controllato. Molto spesso ho sentito amici detectoristi lamentarsi che questo o quel detector, specie tra i modelli più blasonati, gli facevano “scavare troppo ferro” o addirittura gli facevano fare buche enormi senza trovare nulla.
Perché questo accade?
Cercherò di spiegarne i motivi nel modo più semplice possibile, quindi tranquilli… non sarò troppo noioso, almeno lo spero… 😀
Partiamo dai fondamentali…
IL CAMPO ELETTROMAGNETICO EMESSO DA UNA PIASTRA
Quali sono le basi del funzionamento di un metal detector VLF? In soldoni viene fatta passare una corrente alternata a bassa intensità attraverso una bobina, fatta con filo di rame, che si alterna migliaia di volte ogni secondo. Ecco cosa significa avere un detector che va a 6.5 kHz, 15 kHz, 18 kHz etc. Significa semplicemente che la corrente che viene inviata alla piastra cambia polarità (da positiva a negativa) 6.500, 15.000 o 18.000 volte in un secondo. Ovviamente questi sono solo degli esempi, dato che esistono in commercio modelli operanti con frequenze diverse. Ma per ora vi basti…
Quando la corrente passa attraverso questa bobina, detta TRASMITTENTE, si genera un campo elettromagnetico variabile tutto intorno ad essa, con una forma molto particolare. È una specie di “CIAMBELLA” che circonda la bobina. Ovviamente cercare di immaginare la cosa nelle 3 dimensioni. Il grafico, per semplicità, è visto di lato e quindi è bidimensionale.
Come potrete vedere nel grafico che allego, l’emissione del campo elettromagnetico è periferico alla bobina e assume una forma toroidale, ovvero “a ciambella”.
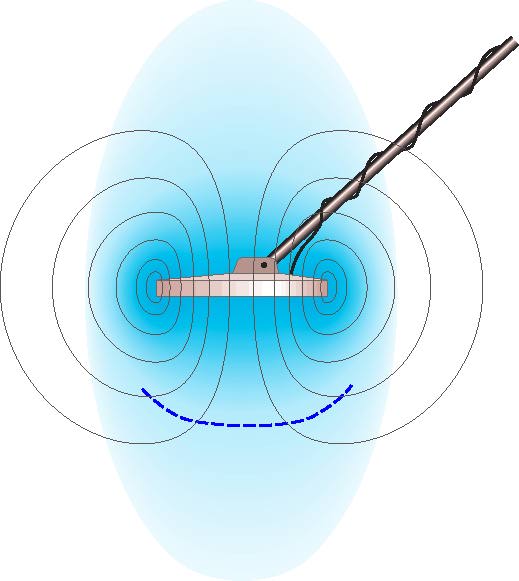
Non si limita quindi a stare esattamente SOTTO la piastra o SOPRA la piastra, ma si estende anche al di fuori.
Va però detto che la zona dove il campo magnetico è più concentrato è proprio in corrispondenza del volume inferiore, quello verso il terreno, e superiore, in maniera speculare.
Quando questo campo elettromagnetico colpisce un oggetto metallico, tende a deformarsi e questa variazione comporta che un’altra bobina, detta RICEVENTE, inizi appunto a “ricevere” il segnale.
Maggiore è la sensibilità dello strumento e maggiore è la grandezza del campo elettromagnetico emesso dalla bobina trasmittente, e maggiore sarà la probabilità che la bobina ricevente sia in grado di captare un segnale anche quando il target non si trova esattamente sotto il perimetro della piastra.
In altre parole, quando il detector è molto sensibile o montiamo una piastra molto grande, si avrà una certa tendenza a rilevare i target anche al di fuori del perimetro della piastra stessa: come se quest’ultima fosse effettivamente più grande del normale.
Ma questa “extra-sensibilità” implica un problema non trascurabile… Quale?
Diamo un’occhiata al prossimo grafico…
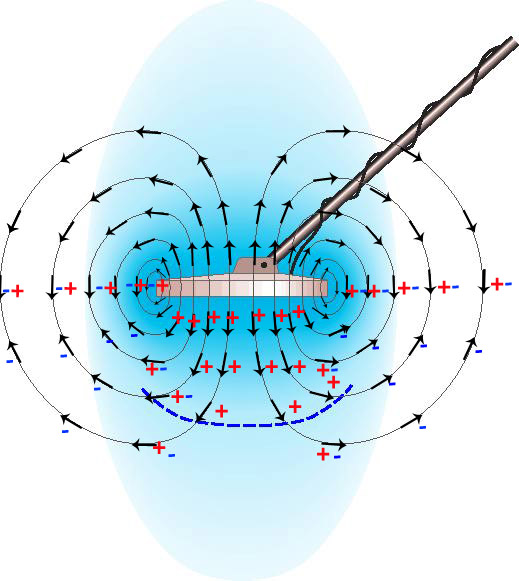
Come potete vedere, le piccole frecce che sono state inserite nell’immagine fanno capire qual è, in un determinato istante, il verso, o per meglio dire, la “polarità” del campo elettromagnetico emesso. Per semplicità, e perché per fare tutte quelle freccette ci ho messo quasi un’ora e mezza, ho evidenziato solo quando la polarità ha un certo segno. Nell’istante successivo, proprio perché la corrente è ALTERNATA, il verso sarà esattamente l’opposto e la direzione sarà esattamente al contrario.
Se guardate bene il grafico, noterete che sotto la piastra tutte le frecce vanno nella stessa direzione, ovvero verso il basso, mentre quelle che sono fuori dal perimetro di dirigono verso l’alto, ovvero hanno una polarità opposta.
Ma in pratica… tutto questo cosa significa?
Significa semplicemente che il campo elettromagnetico sotto la piastra colpirà i target con una determinata polarità, mentre quello che colpisce i target FUORI dal perimetro avrà una polarità invertita!
Si… ma ancora non si è capito dove vuoi arrivare…
Calmi… ci siamo quasi…
In parole povere, i target intercettati FUORI dal perimetro della piastra potrebbero avere un’indicazione distorta o addirittura OPPOSTA a quella normale!
Un target ferroso potrebbe essere segnalato come NON ferroso e viceversa!
Nelle zone di confine questo potrebbe ingenerare delle situazioni “IBRIDE” dove appunto il detector non capisce bene se il target è ferroso o non ferroso.
Bene… dopo questa pappardella teorica, come possiamo sfruttare la teoria per migliorare la pratica?
Tutto quello che ho scritto finora vi permetterà di capire che se il detector è molto sensibile o si sta usando una piastra molto grande, è possibile che un target NON BEN CENTRATO possa darvi un’indicazione erronea o addirittura completamente errata. In altre parole, specie con detector privi di display, potreste credere di aver agganciato un target “buono” che, in realtà, non si trova sotto la piastra, ma all’esterno del suo perimetro.
Cosa significa questo?
Significa che potreste credere di aver rilevato un target non ferroso sotto la piastra mentre invece si tratta di un target FERROSO leggermente al di fuori del perimetro. Andrete a scavare, convinti di aver trovato qualcosa di buono e… scava, scava, scava… non troverete nulla… o troverete un bel pezzetto di ferro.
O, viceversa, potrete perdere dei target buoni perché, a causa di un settaggio di discriminazione troppo elevato, l’oggetto NON ferroso periferico verrà mal interpretato e abbattuto dalla discriminazione.
Concludendo, le raccomandazioni fondamentali, ovvero, seguendo il titolo di questo articolo, le tecniche avanzate di gestione della sensibilità e della discriminazione, mi sento di riassumere le cose in pochi sintetici punti:
- Se usate una piastra grande o avete un detector decisamente molto sensibile, effettuate spazzolate con una sovrapposizione molto stretta e ripetete spesso la copertura del terreno.
- Quando il segnale è “BUONO”, prima di iniziare a scavare, spazzolate tutto intorno al punto ideale del target. Potrebbe infatti essere un oggetto FERROSO che si trova poco fuori dal perimetro che sta ingannando il detector
-

Leonardo/”Bodhi3″ Tenete la discriminazione al livello più basso possibile, specie se siete degli spazzolatori “Veloci”, ovvero che non fanno sovrapposizioni accurate. Questo ridurrà di molto le possibilità che i target NON FERROSI periferici possano essere “abbattuti” da un settaggio di discriminazione troppo aggressivo.

Sperando che questo breve articolo possa avervi aiutato a capire meglio il comportamento delle vostre macchine, vi lascio con un ultimo importantissimo suggerimento: NON esagerate MAI con le impostazioni di sensibilità! Più impostate la sensibilità a valori elevati, maggiori saranno gli effetti descritti in questo articolo.
Buona ricerca a tutti!
Leonardo Ciocca
AMD Tech Team
Grazie Leonardo, quello che hai scritto mi da la conferma di quello che mi è successo in campo con il mio Nokta Impakt, ma essendo solo da tre mesi che uso l’MD non ho molta esperienza sul campo, anche se ho letto moltissimo. In effetti mi è capitato che avendo la sensibilità a 95 e la discriminazione a 15 terreno con erba con rugiada ho scavato bersagli che poi non esistevano… ma spostandomi intorno ritrovavo il segnale a 20/30 cm. circa di distanza. Mi sono chiesto il perché e l’ho chiesto anche a chi me lo aveva venduto pensando ad un difetto, grazie al tuo articolo adesso è tutto molto più chiaro, grazie ancora.
Felice di esserti stato utile!
Un abbraccio e buona ricerca!
Leonardo
AMD Tech Team